After a couple of days of wiring this up and testing it. I have installed most of Scotts
J.E.D.I. Control system into my droid. Now my droid is getting out of the static category to actually doing something.
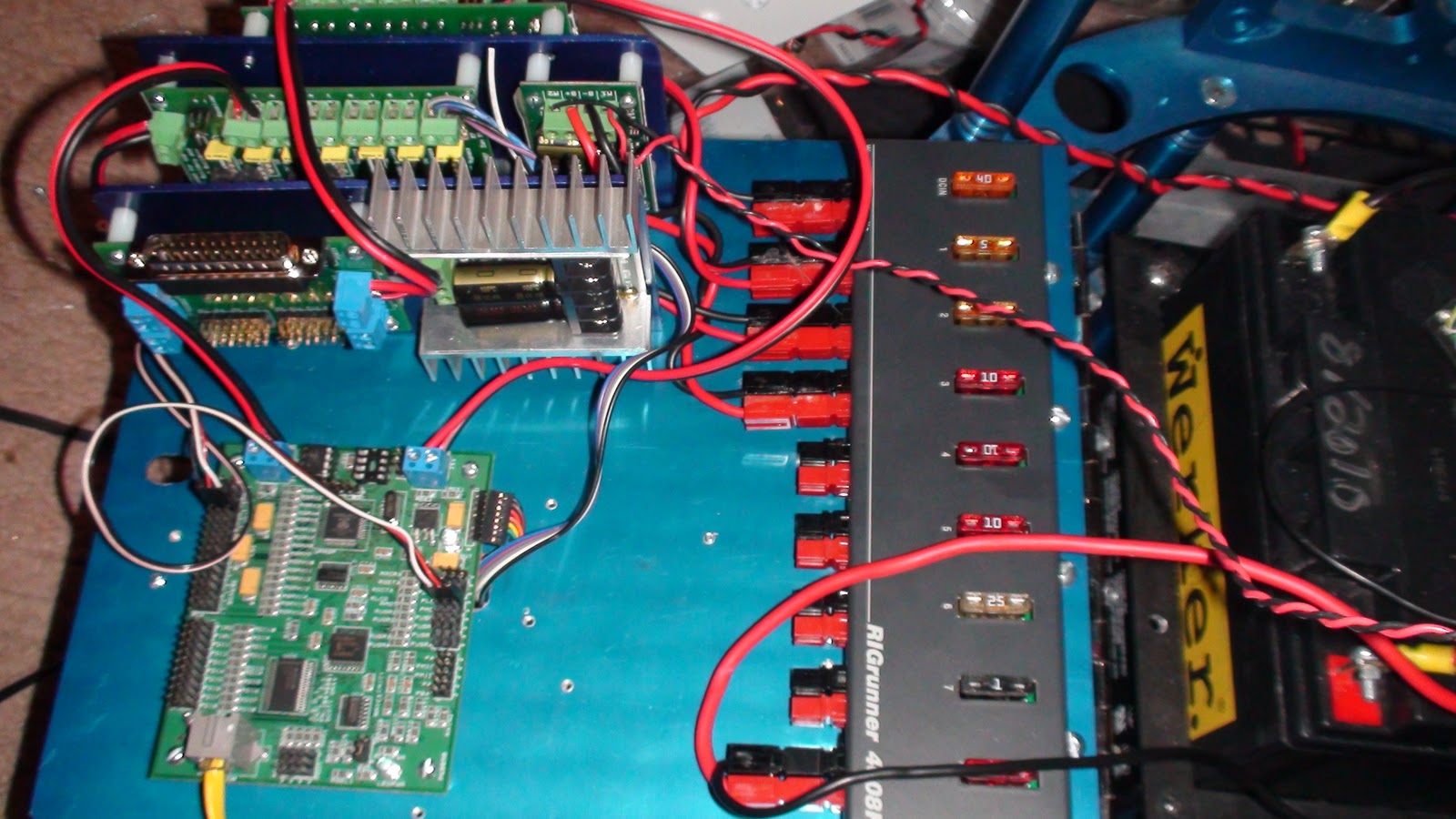
to the upper left is the 12v input from the on/off switch. Next to that 2 wires run down to Dan's Power distribution version 2.1 and 2.2 boards to convert 12v to 5v and feed into the J.E.D.I.Controller. In the center is the Syrene2x25 motor controller that a servo port feed controls the Pittman motor spinning the dome. The final power port is running to the 12v amp.
The two power distribution boards are temporary to get this up and running. When I get the DC/DC converters these probably won't be needed and I'll save twice as much space.
With the panel up I still have plenty of room, but limited space to put some more electronics. Now that most of the JEDI is mounted I kinda of look back on what I should have done. A few things I know I want on the back panel.
1. Easy access to the SD memory card that runs the droid is a must have item. I plan to take this card out a lot and adjust the startup files, or writng my own routines and test them out.
2. The LCD that shows feedback on what the JEDI is reading from the droid wrangler. It would be cool to have the items with the most LED lights on the backside so it looks cooler when the door is off or open.
Oh snap!
I can't close my electronic panel! The Vex area on the J.E.D.I. controller is hitting the Pitman motor:( I only need about 3mm more and it would lock. I have no room left to move it so one of the power distribution boards will have to move and I'll change the wiring to make space. Damn, I cut a hole in the back door to run the vmusic cables for nothing!
So I'm going to have to take this all apart, rewire it and move the JEDI board for sure atleast 1/2 inch inward. I find it sucks tapping 4-40 holes in aluminum so I need to order 4 more taps for all this AL work I foresee. I break them every 40 holes. There's already 1 broke 4-40 tap in this blue panel:) All the other sizes I've never broke one but these are so small eventually it snaps in the hole after some usage.
Well atleast now I have dome control I can rotate this noise thing left or right.!
Now with dome rotation it was and understatement to say it was cool to see it turn left and right from RC control. That was a new milestone passed since this project started nine months ago. I now have power over the sound, dome and servos and soon movement in a couple of months.
However none of this works perfectly and there's always some bugs to work out.
1. The I have to turn up the amp on full settings to here the vmusic sounds properly. The result is a loud buzz. This was be expected. I probably have to get another amp. This one is too big anyway. I'll check astromech and try out a different amp to resolve this.
2. The dome spins okay clockwise at sufficient speed. Spinning it counter clockwise its very loud and only 1/4 of the speed . This suggests some resistance. This was an issue before any of this electronics so I'll check out how level the dome is. It works okay without the R5 head on top of it.
3. I'm ordering some thinner wire and rewiring this all next week. I'll double up the power boards so they are ontop of each other. The JEDI Control board has to be on the inside panel. Because all the servo connections can't be reached if its on the other side. The power boards must also be on the same side as the Rigrunner and JEDI board. The motor controls can go on either side. I'm also thinking about putting this in the droid soon to give me control over 16 more servo/motor options.
Basically I'll wire this up probably for 12volt from the Rigrunner. Then put it somewhere in the droid. Then I can trigger 'something' to happen.
Four micro servos plugged in to test the system. So far so good! I need to figure out how to hook up servos from channel 7-16 and control them with the VEX remote. I hope my next update is how I figured out how to make these servos open and close some doors.























































{kind=link}